| Work Package 6 |
|
|
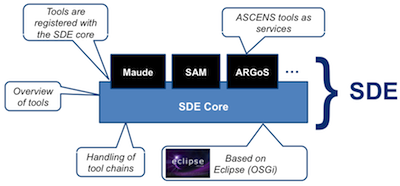
The purpose of this work package is to coordinate the evolution of the various software tools developed within the framework of the project, eventually providing an integrated platform supporting multiple aspects of aware and adaptive system development. Based on the Service Development Environment, the platform will provide the means for understanding aware and adaptive systems both at design time and at run time. To enable as many tools as possible to take part in the platform, the infrastructure considers integrated tools to be loosely coupled, working together where appropriate through public interfaces.
On the development side, our tool support starts with the early stage formal modeling tools. At the current project stage, these tools include the jSAM stochastic model checker for the modeling approaches that rely on process algebras and the Maude Daemon Wrapper for the modeling approaches that rely on rewriting logic. Where applicable, we continue with tools for transition from models to implementations. At the current project stage, these tools include the BIP compiler for the approaches that rely on correctness by construction. For manual implementation, we provide frameworks that reify the formal modeling concepts, at the current project stage these are jRESP and jDEECo, the two frameworks follow different strategies in mapping the SCEL language entities into implementation constructs. Because the manual implementation approaches do not guarantee preserving the correspondence between the model and the code, we also develop methods and tools to verify whether code complies to models. At the current project stage, these tools are represented by the GMC model checker. On the runtime side, our tool support has to consider the differences between ensembles and more ordinary applications. The fact that ordinary applications can be launched as child processes of the integrated development environments greatly simplifies the runtime support implementation. In contrast, ensembles are not easily executed on demand - they may just be too large, or they may even consist of components that are not purely software. To cope with this particular issue, we are working on two complementary alternatives for runtime support. Where possible, such as in the scientific cloud, we plan to use live ensemble introspection. Where not possible, such as in the robotic swarms, we plan to introspect ensemble simulations. At the current project stage, the simulation environment for the robotic swarms is ARGoS. This simulation environment provides built in observation and introspection capabilities. Prototypes that act as ensemble simulators are also being built in jRESP and jDEECo. The current tool for introspection in these environments is based on the DiSL instrumentation framework. On top of DiSL, the SPL evaluation tool is used to reason about performance. Additionally, our work on these introspection tools is aligned with the development of the Science Cloud Platform to eventually allow live ensemble introspection. More details about the specific tools and developed software can be found in the section on Software. Contact: Petr Tuma This e-mail address is being protected from spambots. You need JavaScript enabled to view it |
| Last Updated on Sunday, 10 November 2013 01:40 |